Un rat robot autonome, un humanoïde autonome, un drone autonome… La machine se substituera-t-elle à l’opérateur et prendra-t-elle un jour la décision de tuer ? La question qui nous agite ici est bien celle de l’autonomie de nos machines. Pour comprendre l’état de la recherche relative à cette question, nous nous sommes intéressés aux recherches menées par Olivier Gapenne, chercheur en sciences cognitives et professeur titulaire de l’Université de Technologie de Compiègne.

Stéphane Degoutin & Gwenola Wagon, World Brain, Irrévérence Films, 2015. Photo: D.R. www.arte.tv/worldbrain
Les machines actuelles ne sont pas autonomes, la machine autonome n’existe pas. Sans doute en est-il de performantes, de bluffantes, de brillantes, mais les machines seules ou entre-elles s’organisent selon l’algorithme du programmeur. L’autonomie demeure aujourd’hui une question de biologie théorique pour laquelle nous ne possédons pas de réponse définitive, quelques pistes au mieux. Il ne s’agit donc pas d’aborder frontalement la question de l’autonomie, mais de cerner une propriété des systèmes autonomes que les artefacts ne savent pas assumer actuellement.
Si Olivier Gapenne pose la question de l’autonomie sous cet angle, c’est avant tout guidé par une conviction, celle de croire que c’est actuellement une fausse question de vouloir que les machines soient autonomes, parce qu’il est plus intéressant de saisir l’origine de l’autonomie, de la comprendre. Le chercheur s’en remet ici aux théories de la cognition initiées par Norbert Wiener en 1947, nées dans le vaste contexte scientifique de la cybernétique, ces théories ont été profondément inspirées par le design technologique des machines et réciproquement, les évolutions technologiques ne manquent pas de s’inspirer des travaux dans le champ des sciences de la cognition. Ces machines, issues de cette nouvelle famille technologique, présentent des formes d’auto-organisation inédites et permettent la mécanisation du calcul.
Stéphane Degoutin & Gwenola Wagon, World Brain, Irrévérence Films. Photo: © Guillaume Onimus, 2015. www.arte.tv/worldbrain
Le projet rat
Pour tenter d’aborder l’origine de l’autonomie dans ce champ des sciences de la cognition et au regard de ce nouveau paradigme de l’enaction [lire encadré], dont Olivier Gapenne est familier, le chercheur a initié un programme de recherche que nous appellerons le projet rat. Ce programme se développera sur plusieurs années, il prend pour sujets de laboratoire un double rat : le rat robot et le rat vivant. Ainsi, l’expérience sur le rat vivant sera menée en Normandie, à Rouen, au sein du Laboratoire Psy-NCA en collaboration avec Vincent Roy. Et l’expérience sur le rat robot sera menée en Picardie, à Compiègne, au sein de l’unité de recherche CNRS Heudiasyc. Nos deux entités sont rejointes pour ce projet par les laboratoires voisins du centre de recherche de l’UTC : deux unités du CNRS, l’une en bio-mécanique et bio-ingénierie (BMBI) et l’autre en mécanique (Roberval). Le projet étant soutenu par un Labex au nom intrigant de Maîtrise des Systèmes de Systèmes Technologiques (MS2T).
L’expérience qui sera proposée au robot et à l’animal est similaire, l’une enrichit l’autre. Ce qui intéresse Olivier Gapenne du côté de l’animal et au travers de ce projet de recherche est de bien comprendre ce que le rat parviendra à faire ou à apprendre. Ainsi, les chercheurs pourront accompagner le robot dans ce qu’il n’est pas encore capable de faire. Tout ce cheminement du sujet animal pourra être implémenté chez le sujet robot et nous invitera à proposer une stratégie de conception qui permettra à des agents robotiques de manifester cette capacité à apprendre par eux-mêmes. L’effort de formalisation produit pour le robot éclairera à son tour le comportement de l’animal.
Trois années ont été nécessaires pour penser le programme de recherche, pour constituer une équipe, pour comprendre sous quel angle aborder ce sujet de l’autonomie, pour inventer la possibilité d’une expérimentation entre vivant et robotique, pour avancer sur cette question non résolue aujourd’hui : un agent robotique peut-il être capable de générer de lui-même une capacité d’apprentissage et une stratégie d’apprentissage ? Car les agents actuels, qu’ils soient des rats robots, des drones ou bien des humanoïdes, sont dotés d’algorithmes d’apprentissage avant même d’apprendre à voler seuls ou encore à dialoguer avec l’homme. Eux, nos agents aux fonctions et formes multiples, ne possèdent pas l’organisation appropriée permettant de générer les conditions de l’apprentissage et de révéler la production d’une stratégie efficace. Eux ne sont pour l’instant que nos fidèles assistants, nos machines bienveillantes. Quelle sorte d’agent doté de moyens d’action et de capture ainsi que d’une structure les mettant en relation apprend à réaliser une tâche non explicite a priori ?
C’est au travers de ces questions aujourd’hui non résolues que l’histoire du projet rat et son expérience débutent. L’expérimentation du programme de recherche est proposée pour trois rats : le rat simulé, le rat robot et le rat animal. Ainsi et accompagné de biophysiciens, d’automaticiens, de mécatroniciens et de comportementalistes, un premier temps de la recherche est dédié à la programmation d’un simulateur de rat, afin que la dimension algorithmique de l’expérimentation à venir puisse être en partie cernée par les chercheurs. Puis, l’expérience sera menée conjointement sur des rats robots et des rats vivants, c’est-à-dire que les uns et les autres auront à apprendre ce qu’ils ne connaissent pas encore. Afin de nous expliquer le fondement de cette expérience, Olivier Gapenne évoque ce principe expérimenté au sein de recherches liées à la perception de l’aveugle grâce aux systèmes de substitution sensorielle (Tactile Vision Substitution System) : La caméra récupère un signal non perceptible chez l’aveugle, puis le signal est relayé sur sa peau. Alors et grâce à cet élément nouveau dont il dispose à présent, l’aveugle a la capacité d’apprendre à exploiter ce signal qu’il n’a jamais pu exploiter auparavant. La condition de cette nouvelle perception étant la possibilité d’une action qui détermine les sensations, une action agentive.
Stéphane Degoutin & Gwenola Wagon, World Brain, Irrévérence Films. Photo: © Guillaume Onimus, 2015. www.arte.tv/worldbrain
Expérimenter une chaîne mécatronique complète
Si la personne aveugle de naissance peut percevoir nos images autrement, si la personne sourde de naissance peut appréhender nos sons et voix différemment, alors que pouvons-nous imaginer comme apprentissage d’une perception nouvelle pour un animal ou une machine robotique ? Voici la question que nous souhaitons poser au chercheur, de l’homme à l’animal, de l’animal à la machine et inversement. Chez les êtres vivants, et nous pouvons l’observer facilement, l’humain sait générer de lui-même et avec ses propres atouts une capacité et une stratégie d’apprentissage dès lors qu’il est dans une configuration inconnue, comme dans ces situations de suppléance perceptive pour l’aveugle. Cependant, cette possibilité est largement facilitée par les consignes et les explications données par les chercheurs. Du côté de l’animal, c’est beaucoup plus compliqué de lui faire appréhender un événement qui se produit et autour duquel il va devoir organiser lui-même son comportement. J’imagine que je suis l’animal que l’on pose sur cette table, alors que fais-je ici ? Qu’ai-je à accomplir là ? J’ai tout à découvrir.
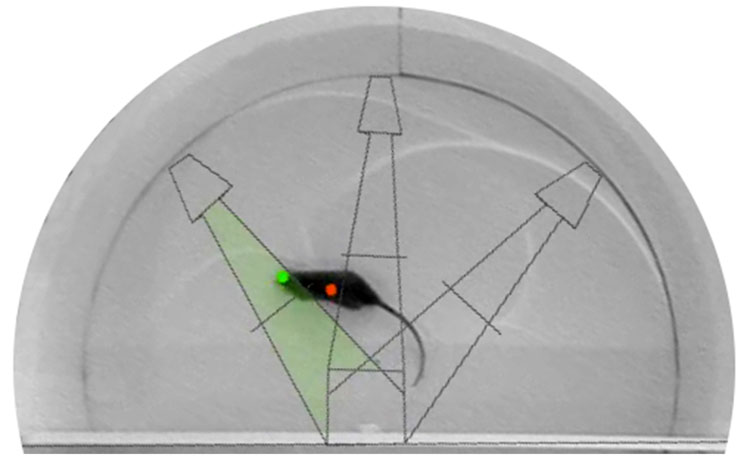
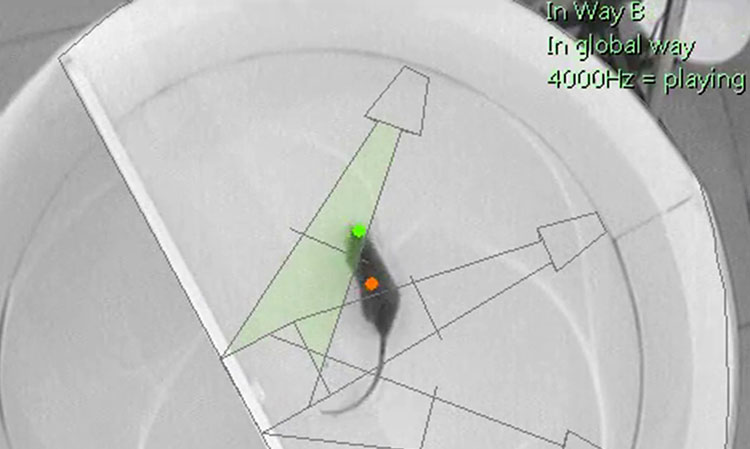
Pour mener l’expérience avec l’animal, l’homme a été habitué à accompagner son apprentissage, cette capacité à apprendre. Ainsi, le protocole existant à ce jour permet de montrer qu’un animal est capable de générer par lui-même une stratégie d’apprentissage : le rat apprend, par exemple, à naviguer sur un contour sonore dans le noir pour aller vers des points de récompense. Notons que dans cette situation, nous avons pris l’habitude d’extérioriser tous les éléments pendant l’expérience : l’animal est traqué depuis l’extérieur par une caméra infra-rouge, les signaux sonores sont spatialisés dans un espace hors de son corps.
Pour ce projet, l’idée que nous avons, c’est que tout ce qui est externalisé lors d’une expérience classique, nous le ramenions dans l’animal, à l’intérieur de l’animal. L’idée, c’est de l’équiper en quelque sorte d’une chaîne mécatronique complète. Tout est à l’intérieur, là, sous la peau du rat. Nous allons lui implanter une fibre optique au travers de laquelle transitera un signal que sera traité en temps réel. Ainsi et en fonction des informations émises, le rat recevra des vibrations qui seront délivrées par des micro-moteurs placés sous la peau. Donc l’animal agit et balade avec lui les capteurs. Chaque fois que le rat capture un signal qu’il ne perçoit pas spontanément, cela génère une sensation tactile chez lui. Cette nouvelle situation de l’expérience d’apprentissage du rat peut poser des problèmes assez géniaux. Les spécialistes de l’équipe du projet vont donc tenter de valider la capacité d’un animal à récolter un signal inconnu grâce auquel il apprendra à développer un nouveau comportement. Ici, en l’occurrence, il s’agit pour le rat de suivre un contour optique dans des longueurs d’onde qu’il ne perçoit pas directement. Le rat organise son comportement en fonction de la perception de cet événement et il apprend à se déplacer autrement pour être récompensé.
Certes, nous n’avons pas de réponse à cette question des machines autonomes, mais le projet rat nous invite à penser autrement peut-être. C’est ainsi que les deux artistes Stéphane Degoutin et Gwenola Wagon nous proposent d’entrer dans leur fiction : On pourrait imaginer que les rats dont l’adaptabilité aurait été améliorée par des décennies de recherches faites sur eux pour soigner l’espèce humaine, envahiraient les réseaux de data centers. Une colonie de rats envahirait ce lieu, se l’accaparant pour s’en faire un terrier, créant des galeries, nichant dans les serveurs, accumulant les excréments, grignotant les câbles. Malgré son apparence chaotique, il deviendrait l’Umwelt des rats à l’ère des machines en réseau. Umwelt Rat Réseau est une proposition scénique présentée dans le film/performance World Brain réalisé par les deux artistes Stéphane Degoutin et Gwenola Wagon. Laissons-nous rêver à ce rat anachronique, passant d’un projet de recherche à un projet de fiction, reformulant sans cesse ce dialogue homme/machine au regard de nos différences.
Agnès de Cayeux
publié dans MCD #78, “La conjuration des drones”, juin / août 2015